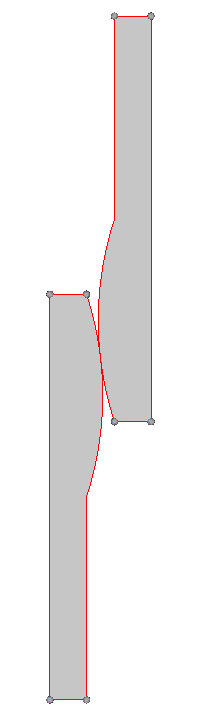
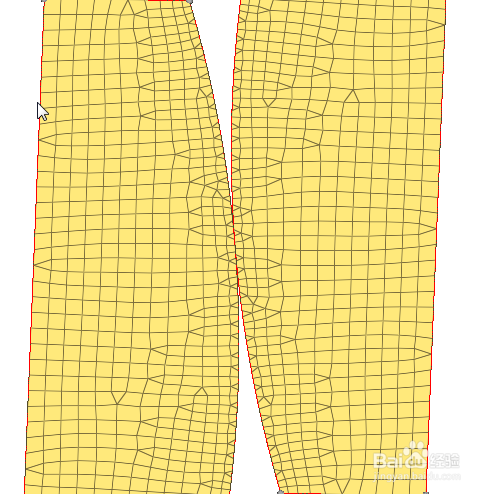
1、1)建立弹性锄头平面模型,并进行网格划分,点击F12剖分网格:

2、2)定义材料和平面单元Plane42的属性,设置单元的关键字K3=0,即平面应力单元,通过property为单元赋予厚度:


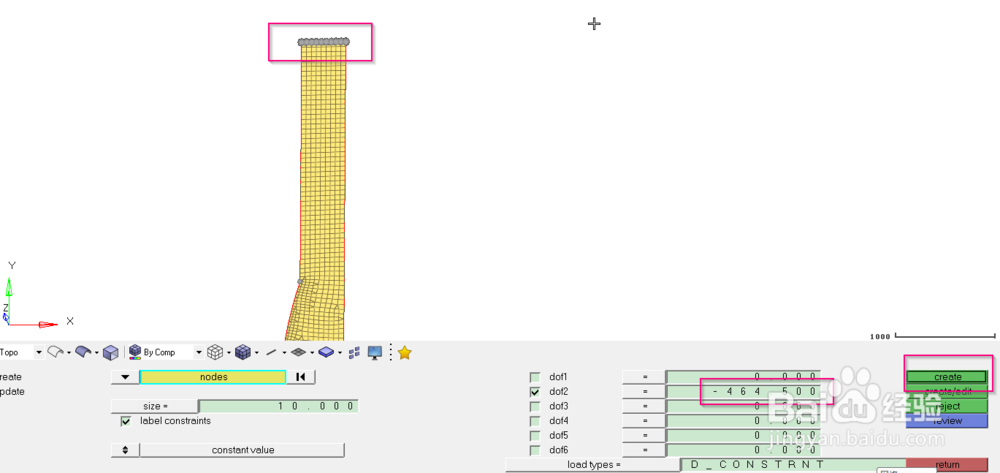
3、3)施加约束建立工况,点击Analysis>constrains,定义好之后导出到ANSYS:


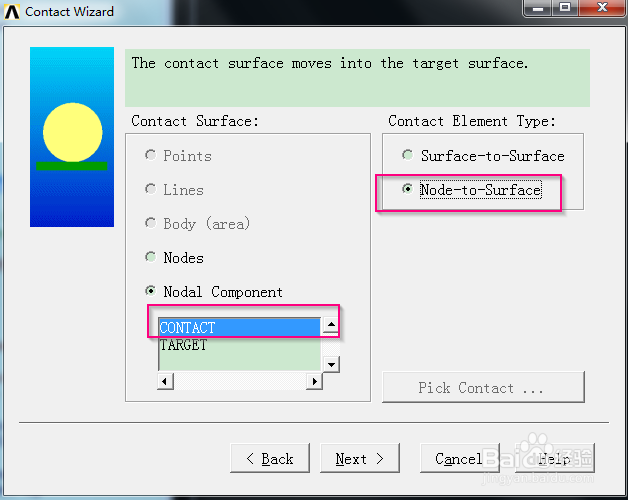
4、4)点击Preprocessor>Modeling>contactpair,创建新的接触对:


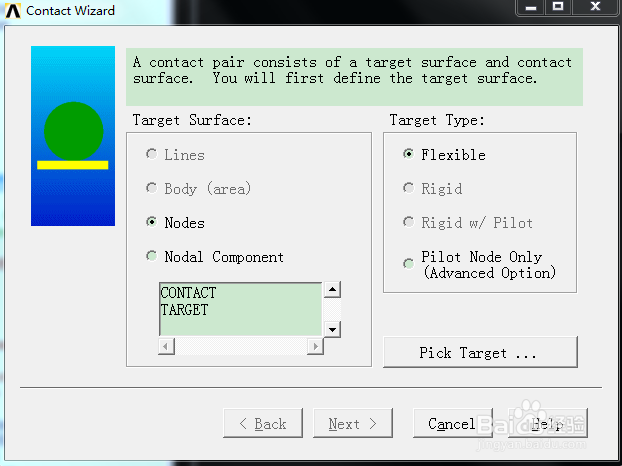
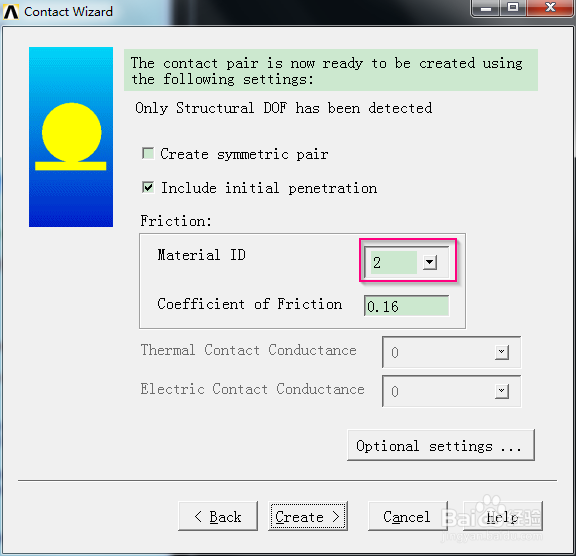
5、5)根据在HyperMesh中创建Set创建接触对,点击Target,选择后点击Next,选择point-surface接触,选择Contact,完成接触对设置,选择材料为我们设置好的Meter2,完成定义:

6、6)设置求解,点击Solution,control,进行求解设置如下:

7、7)点击Slove,根据荷载步进行求解,并查看结果。
