1、如下图所示,
打开UG10.0软件,新建一空白的模型文件,
另存为:UG10.0练习三维建模七百五十之拉手
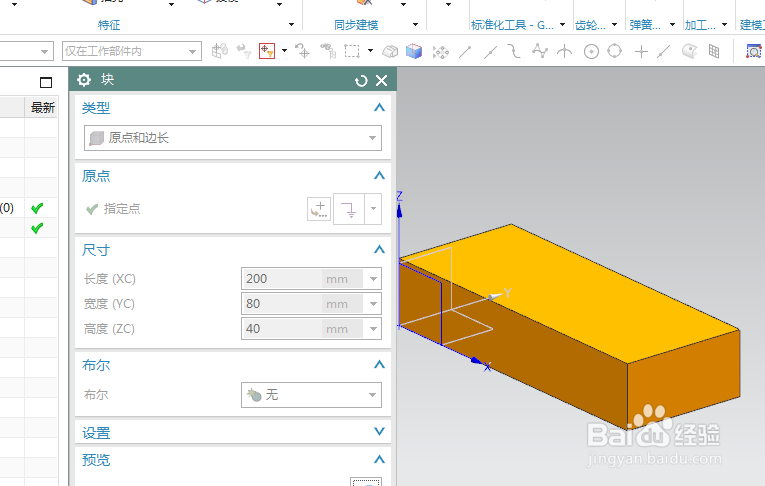
2、如下所示
执行【】菜单——插入——设计特征——长方体【】,
指定点:坐标原点,设置尺寸:200x80x40,
点击确定。
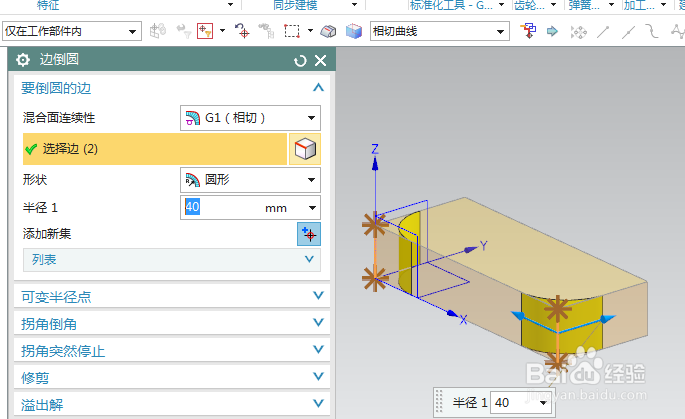
3、如下所示,
点击工具栏中的边倒圆命令,
设置半径为R40,选择两条实体短边,点击确定。
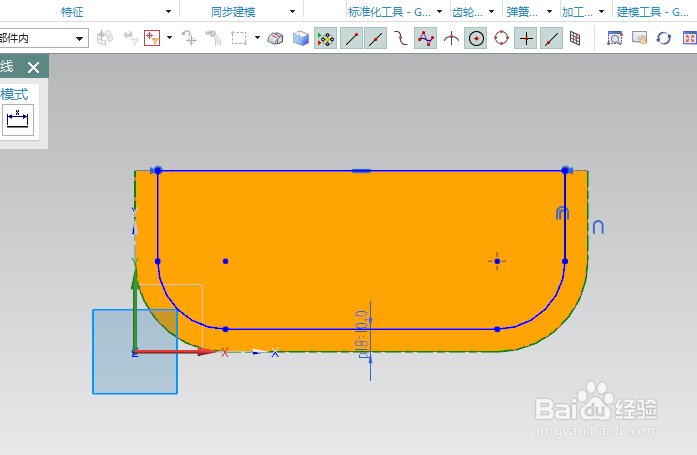
4、如下所示,
执行【草图——XY平面——确定】,进入草图,
激活偏置曲线命令,向内偏置10,激活快速修剪,修剪掉上边线,然后激活直线,连接封闭,
点击完成退出草图。
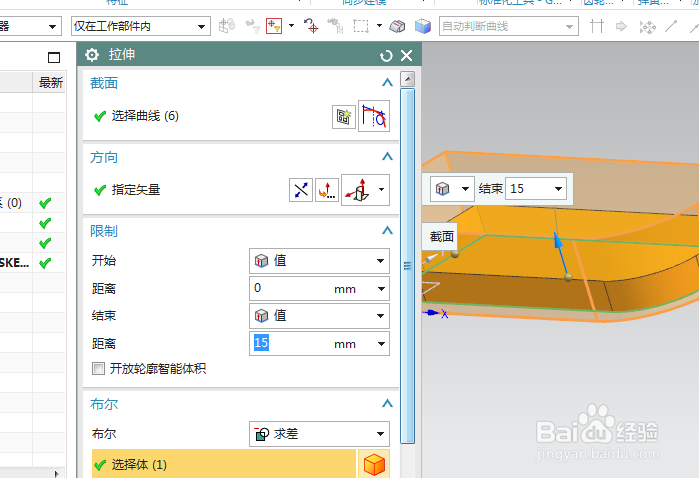
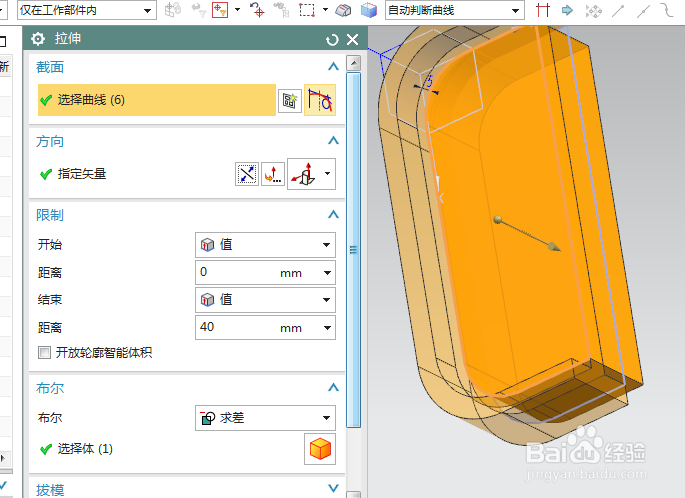
5、如下所示,
点击工具栏中的拉伸命令,截面选择刚刚的草图,
设置限制:0开始,15结束,
布尔求差,点击应用。
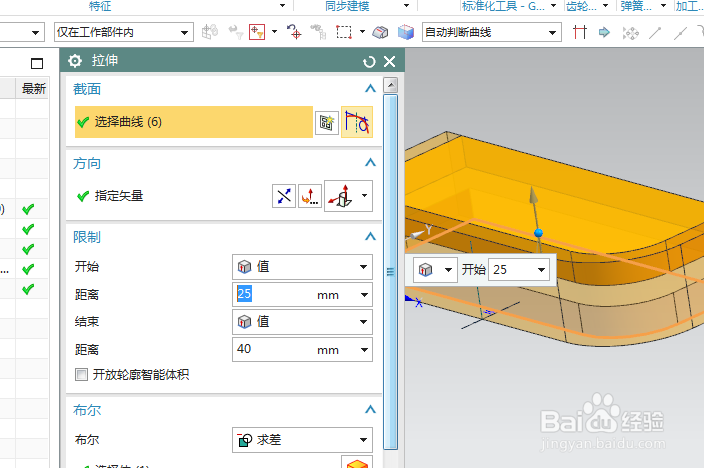
6、如下所示,
选择刚刚的草图为截面,
设置限制:25开始,40结束,
布尔求差,点击确定。
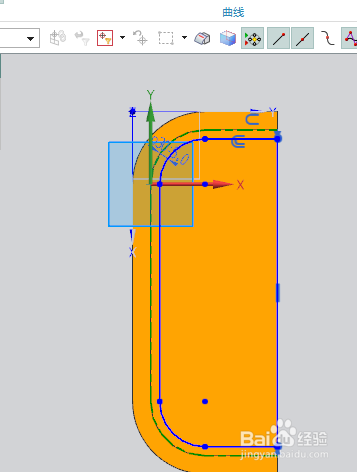
7、如下所示,
点击工具栏中的 拉伸命令,
点击实体中的平面,直接进入草图。
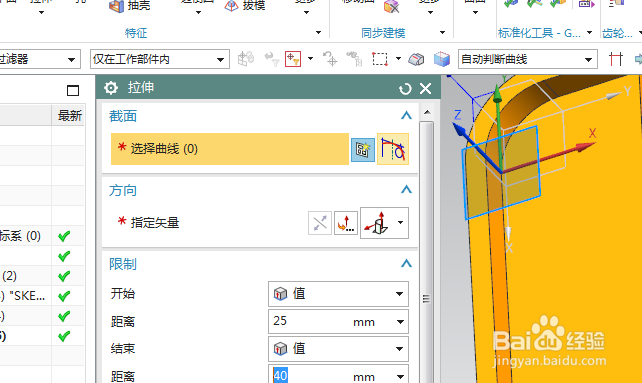
8、如下所示
激活偏置曲线命令,向内偏置5,
激活快速修剪,修剪掉右边线,
然后激活直线,连接封闭,
点击完成退出草图。
9、如下所示,
设置限制:0开始,40结束,
布尔求差,点击确定。
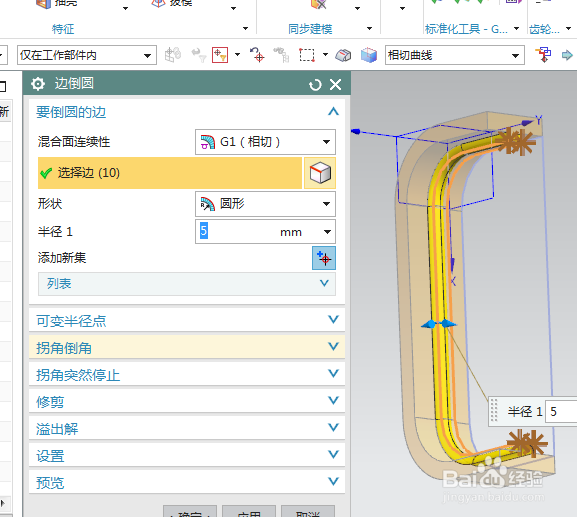
10、如下所示,
点击工具栏中的边倒圆命令,
设置半径为R5,选择两条实体边线,。点击应用。
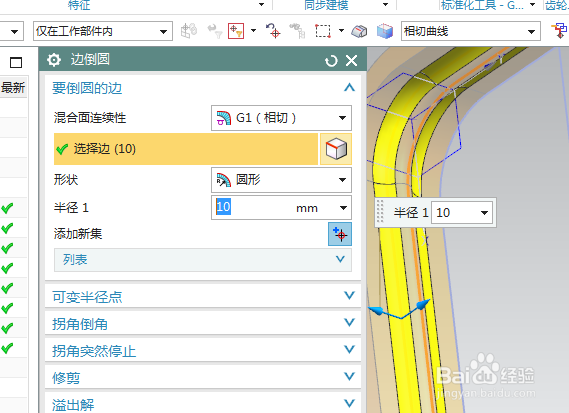
11、如下所示
设置半径为R10,重新选择两条实体边线,点击确定。
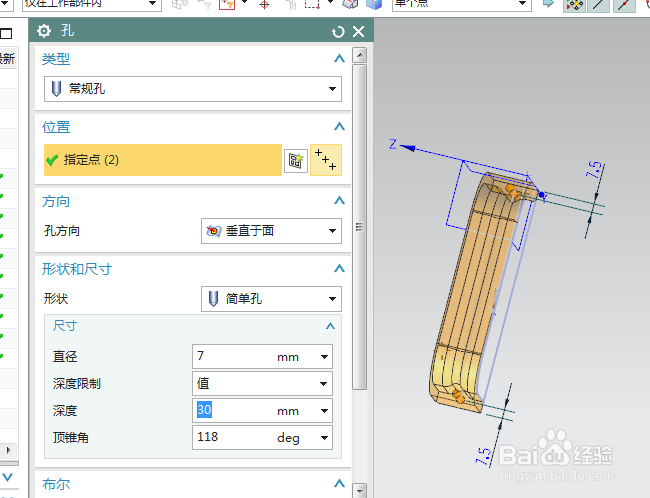
12、如下所示
点击工具栏中的孔命令,
指定点:两个点都距离各自的边7.5,且在中心线上,
设置形状为简单孔,直径7,深度30,
点击确定。
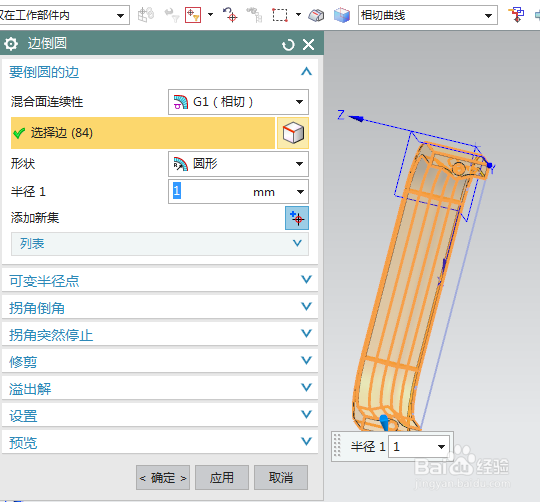
13、如下所示,
点击工具栏中的边倒圆命令,
ctrl+a,选中所有的实体边线,
设置半径为R1,点击确定,
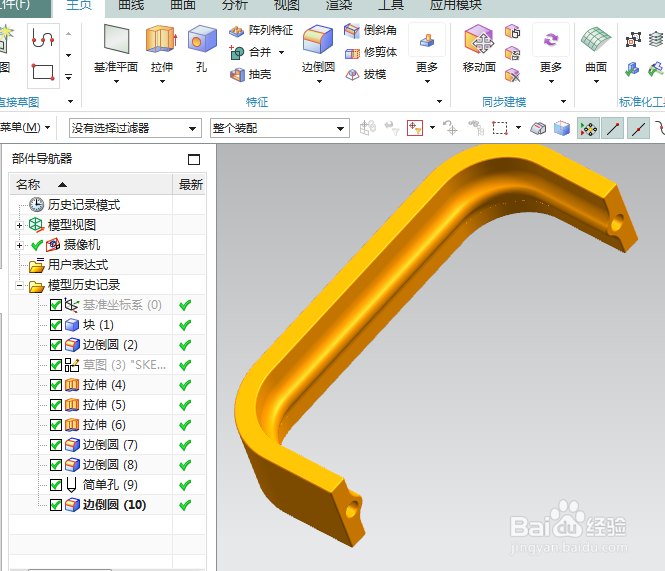
14、如下所示,
隐藏基准坐标系,显示设置为着色,
支持,
这个三维实体就建模完成,
本次练习结束。