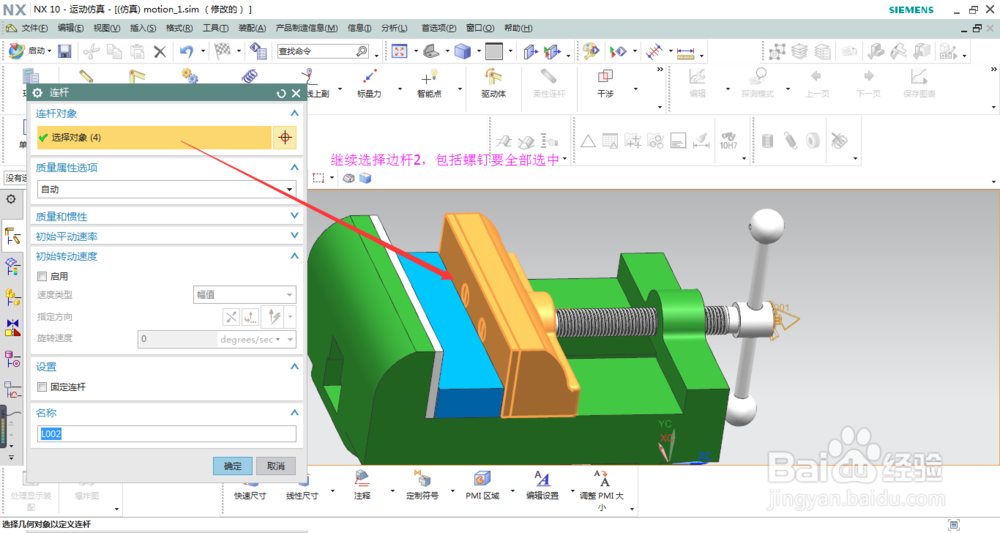
1、首先打开装配体,点击启动/运动仿真进入运动仿真模块,新建一个运动学仿真。设置连杆1和连杆2,具体操作如图所示

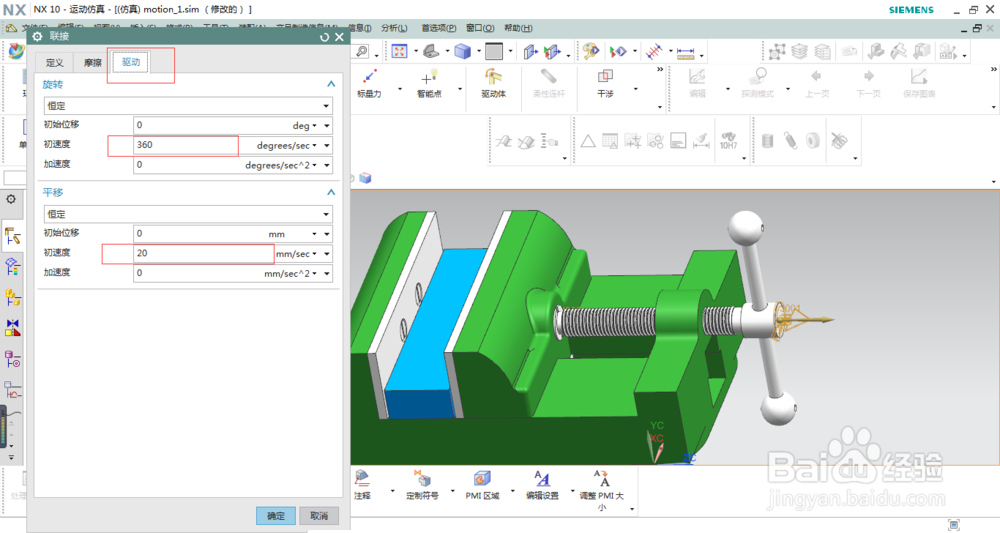
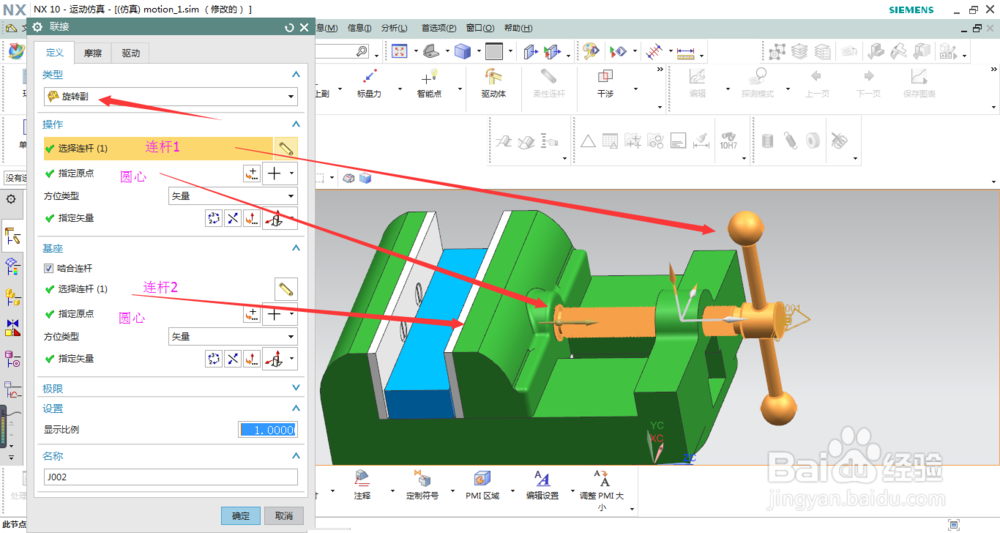
2、接着创建运动副中的柱面副,选择连杆1为操作对象。添加驱动,各参数如图。然后创建旋转副,连杆1为操作对象,连杆2为啮合对象,如图

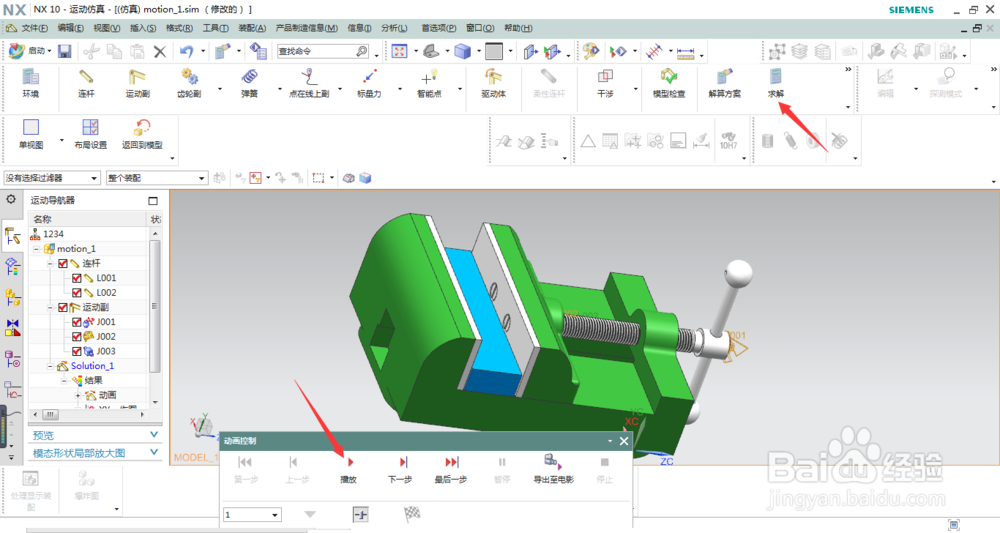
3、最后创建滑动副,选择虎钳移动座为操作对象,点击面上任意一点为原点,如图所示。所有联连设置完成,点击方案解算,设置时间和步数,具体操作如图


4、设置完成以后点击求解,播放动画如图所示

时间:2026-04-23 11:57:28
1、首先打开装配体,点击启动/运动仿真进入运动仿真模块,新建一个运动学仿真。设置连杆1和连杆2,具体操作如图所示
2、接着创建运动副中的柱面副,选择连杆1为操作对象。添加驱动,各参数如图。然后创建旋转副,连杆1为操作对象,连杆2为啮合对象,如图
3、最后创建滑动副,选择虎钳移动座为操作对象,点击面上任意一点为原点,如图所示。所有联连设置完成,点击方案解算,设置时间和步数,具体操作如图
4、设置完成以后点击求解,播放动画如图所示
