1、ABB机器人在机柜上进行旋钮切换到手动模式

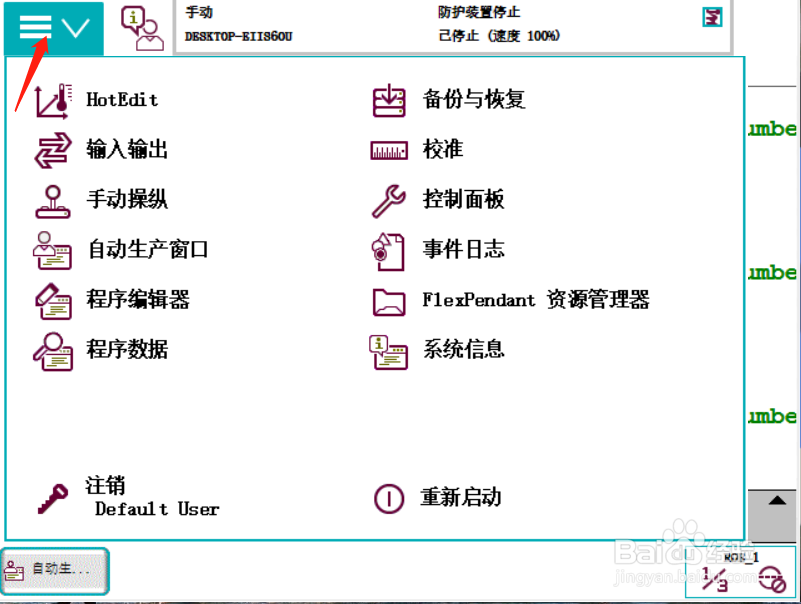
2、点击示教器主页面左上角菜单栏(老版本左上角ABB),进入主菜单栏
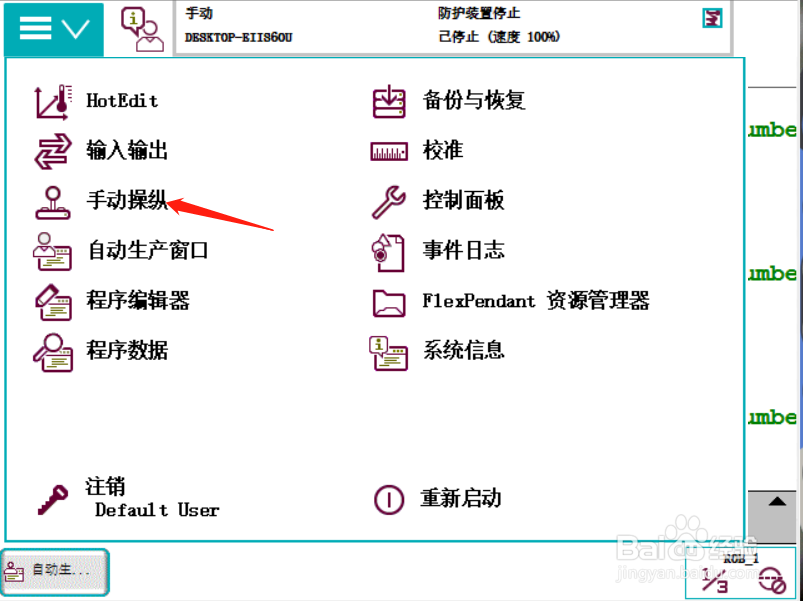
3、点击手动操纵
4、点击动作模式
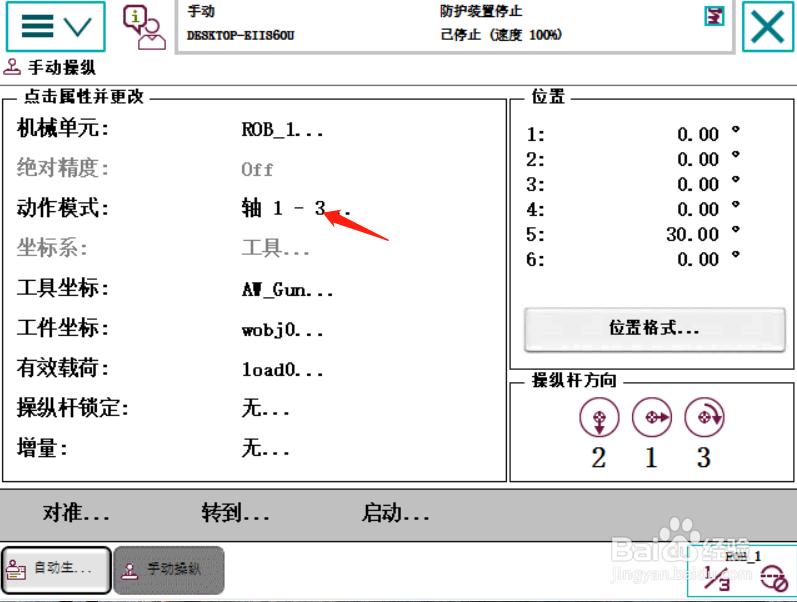
5、此界面有4种模式选择,选择轴1-3,点击确认

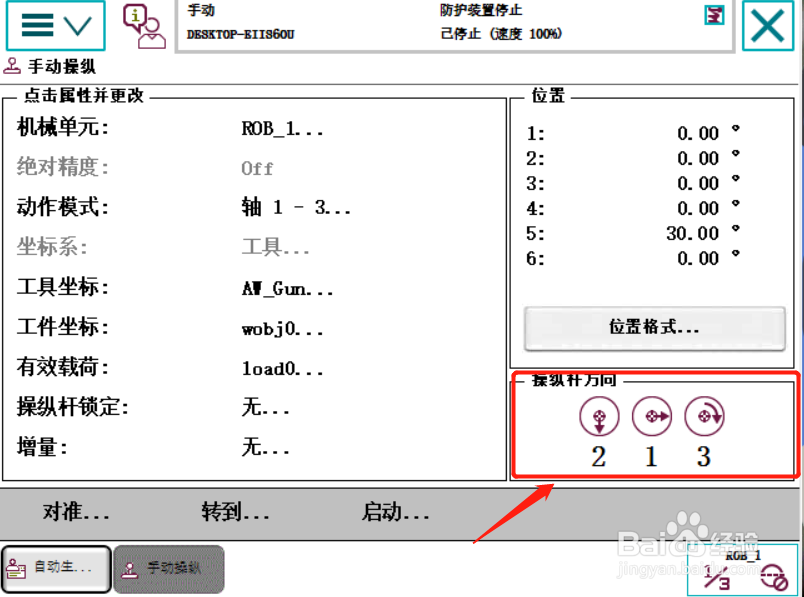
6、此时示教器遥杆所控制的轴为1-3轴及方向
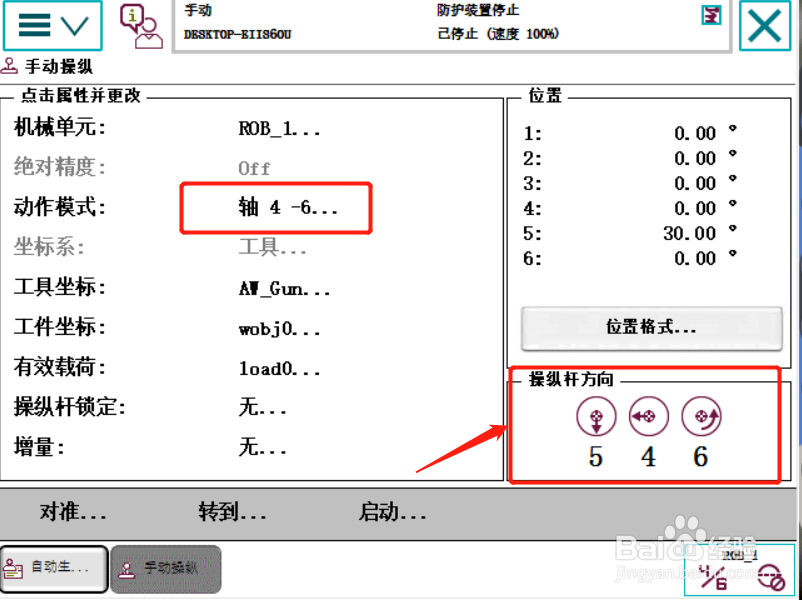
7、同样的方法选择轴4-6此时示教器遥杆所控制的轴为4-6轴及方向
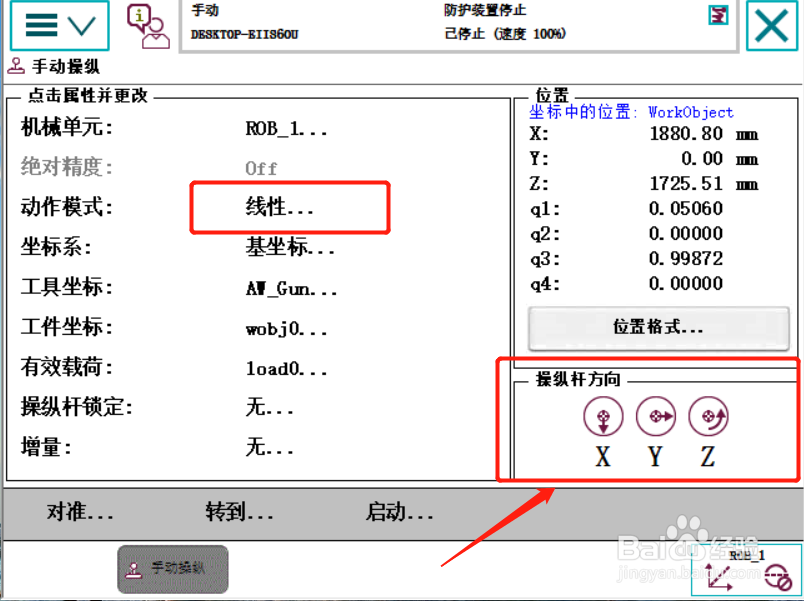
8、同样的方法选择线性运动此时示教器遥杆所控制机器人第六轴法兰盘上工具的TCP在空间中作线性运动
9、同样的方法选择重定位此时示教器遥杆所控制机器人第六轴法兰盘上的工具TCP点在空间中绕着坐标轴旋转的运动

