1、先装配好机械臂爪的一侧。

2、然后使用镜像特征,进行镜像零部件。

3、这样就能够实现对称的同步运动了。

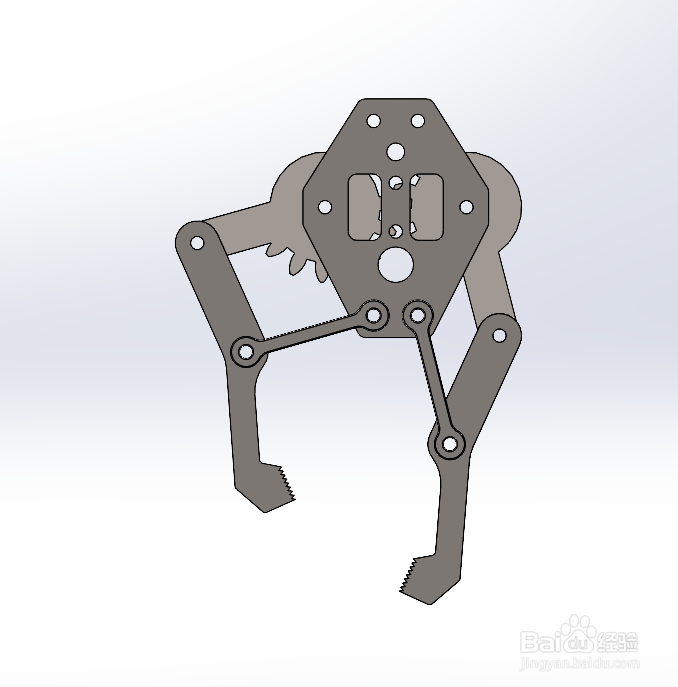
1、将机械臂爪的所有零部件进行装配。
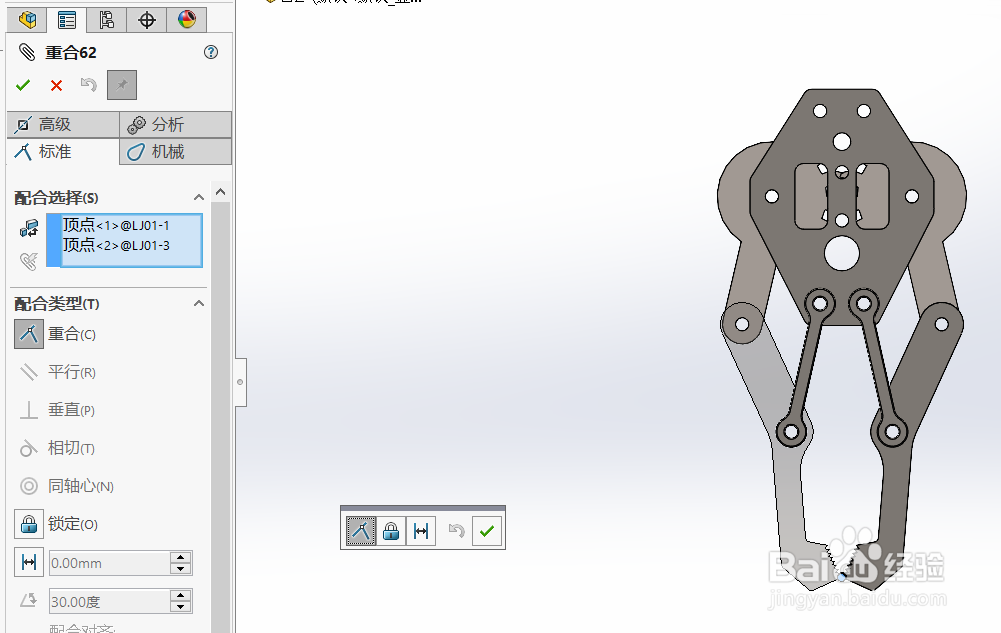
2、找准机械爪的顶点,添加重合配合,保证机械爪两端对称。
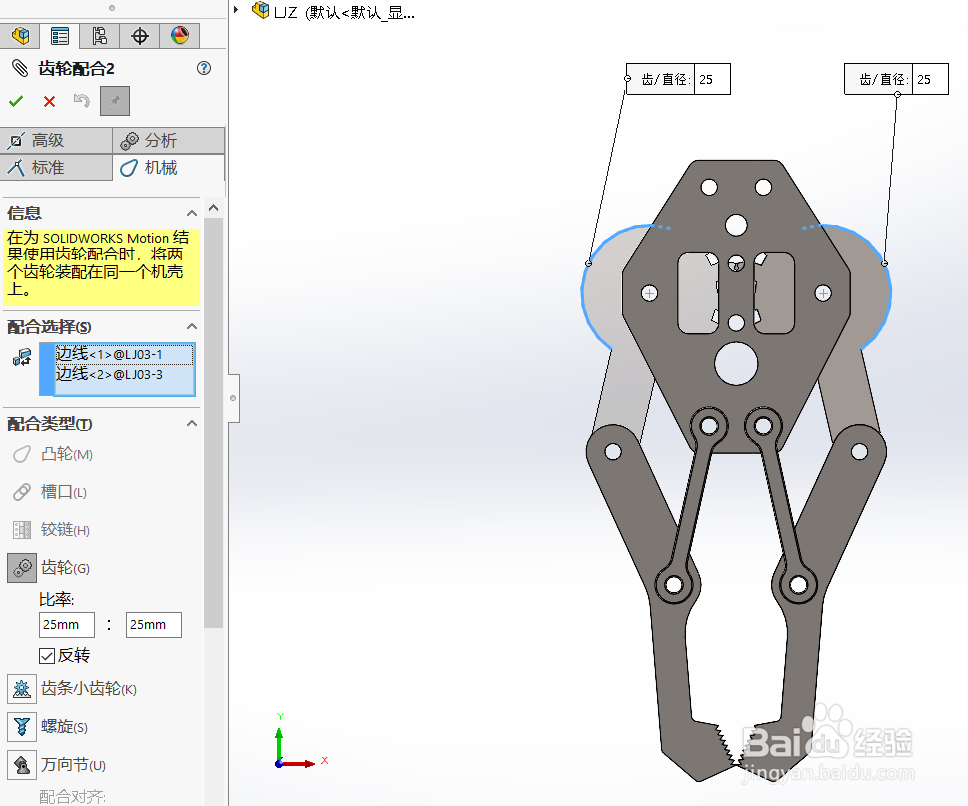
3、在驱动的圆形轮廓上添加齿轮配合,调整旋转比例并勾选反转。
4、删除或者压缩上一个重合特征。
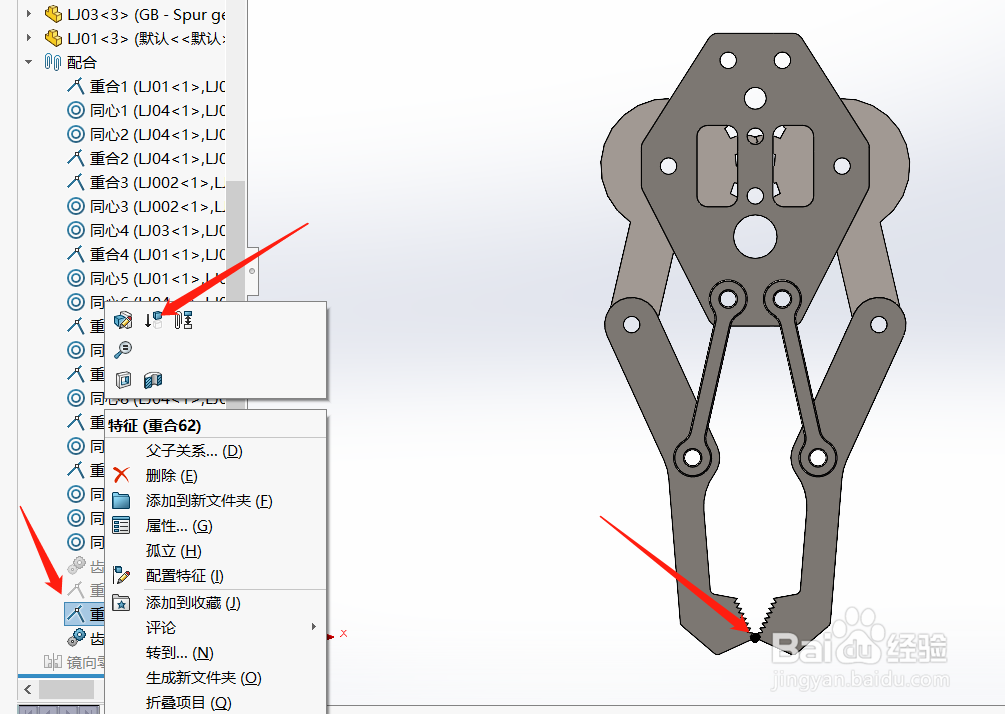
5、然后就能够实现对称同步运动了。
时间:2026-04-30 05:11:42
1、先装配好机械臂爪的一侧。
2、然后使用镜像特征,进行镜像零部件。
3、这样就能够实现对称的同步运动了。
1、将机械臂爪的所有零部件进行装配。
2、找准机械爪的顶点,添加重合配合,保证机械爪两端对称。
3、在驱动的圆形轮廓上添加齿轮配合,调整旋转比例并勾选反转。
4、删除或者压缩上一个重合特征。
5、然后就能够实现对称同步运动了。
