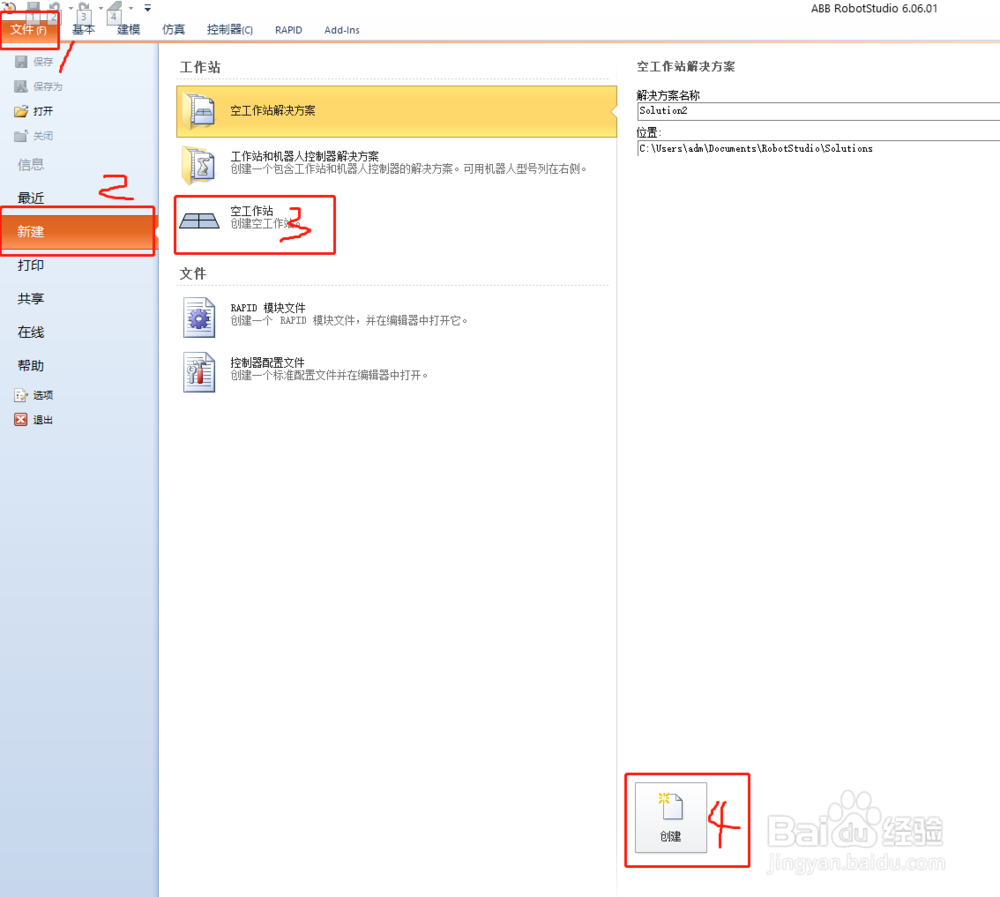
1、打开软件新建项目:文件---新建---空工作站---创建
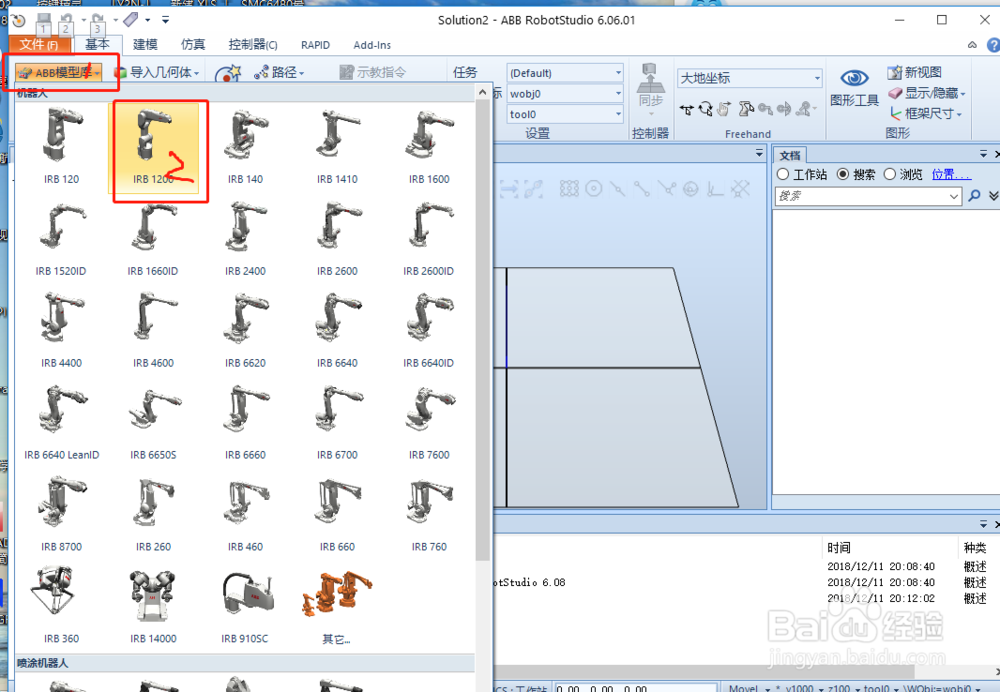
2、选择机器人:ABB模型库---选择合适的机器人如下图所示(我这里选的是1200)
3、新建机器人系统:机器人系统---从布局

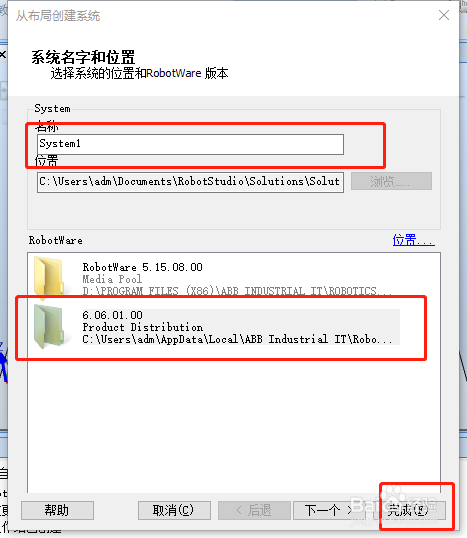
4、设置系统名字和位置:输入系统名字设置RobotWare版本
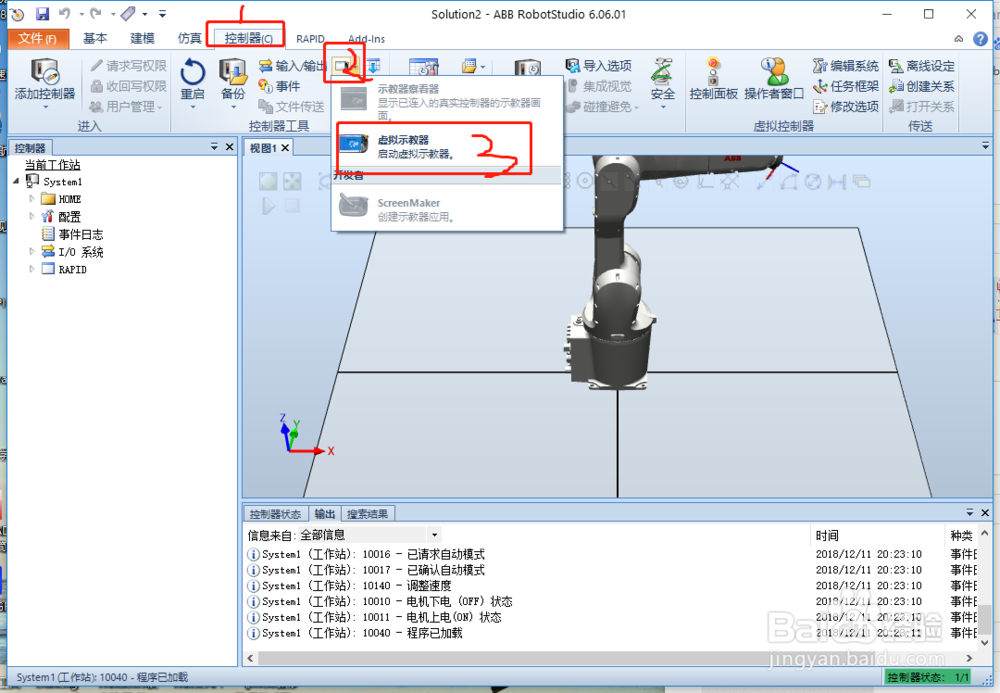
5、打开示教器:控制器---虚拟示教器
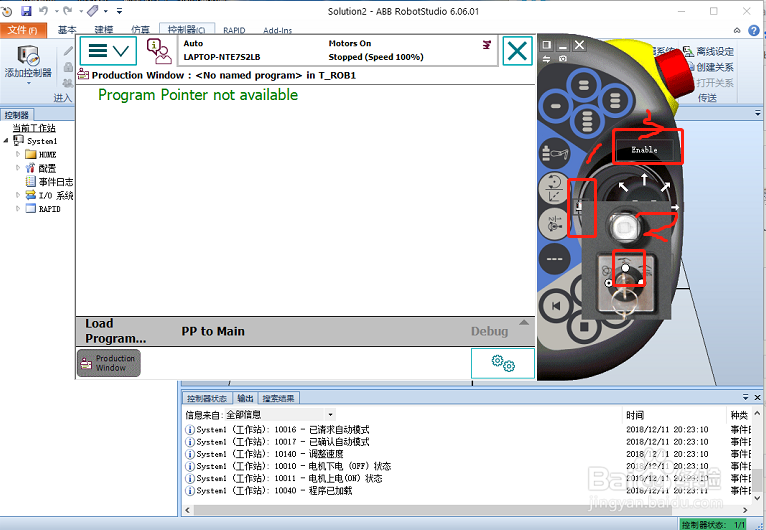
6、切换收到模式并上电使能机器人:按照如下图所示顺序
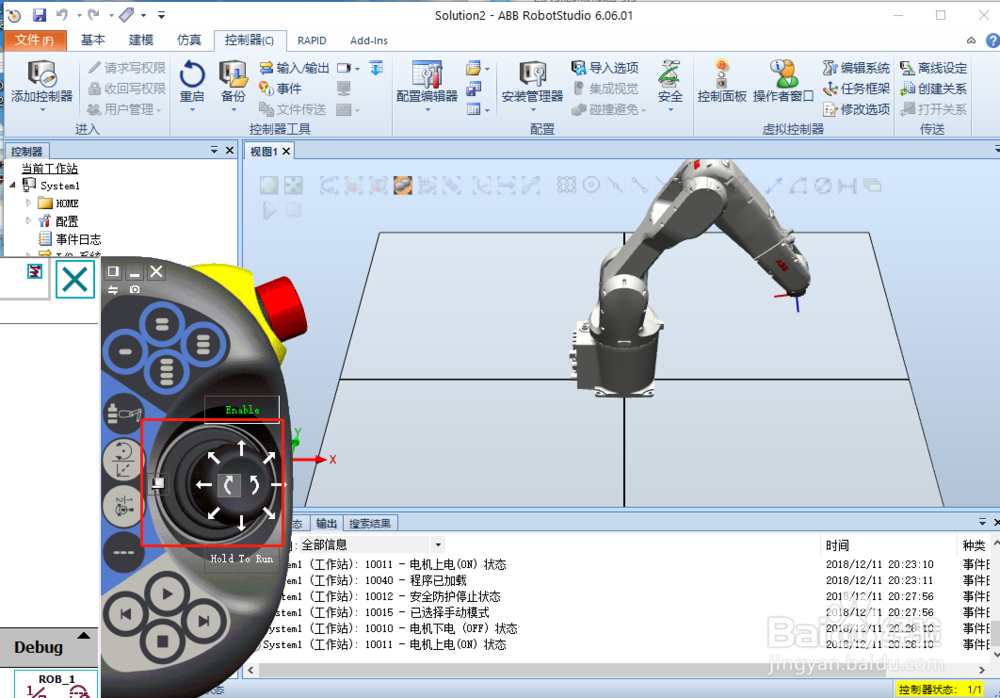
7、按方向键操作机器人运动:如下图所示
时间:2026-04-27 05:18:08
1、打开软件新建项目:文件---新建---空工作站---创建
2、选择机器人:ABB模型库---选择合适的机器人如下图所示(我这里选的是1200)
3、新建机器人系统:机器人系统---从布局
4、设置系统名字和位置:输入系统名字设置RobotWare版本
5、打开示教器:控制器---虚拟示教器
6、切换收到模式并上电使能机器人:按照如下图所示顺序
7、按方向键操作机器人运动:如下图所示
